化設(shè)備有限公司")
 English
English
化設(shè)備有限公司")



 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~L329-C18G型1.8G桿式導(dǎo)波雷達(dá)物位計(jì)
典型應(yīng)用:液體、粉料、固體顆粒料
測(cè)量范圍:10米
頻率范圍:500MHz~1.8GHZ
測(cè)量精度:土10mm
介質(zhì)溫度:-40~130℃C,-40~250°C
過程壓力:-0.1~4.0MPa
過程連接:螺紋、法蘭(可選)
防護(hù)等級(jí):IP67
防爆等級(jí):EXiaICT6(可選)
信號(hào)輸出:4...20mA/HART(兩線/四線);RS485/MODBUS.
由于采用了先進(jìn)的微處理芯片和獨(dú)特的回波放大處理技術(shù),導(dǎo)波雷達(dá)物位計(jì)排除其他因素干擾,可以應(yīng)用于各種復(fù)雜工況。
多種過程連接方式及探測(cè)組件的型式,使得L329-C18系列導(dǎo)波雷達(dá)物位計(jì)適用于各種復(fù)雜工況及應(yīng)用場(chǎng)合。如:高溫、高壓及小介電常數(shù)介質(zhì)等。
采用脈沖工作方式,導(dǎo)波雷達(dá)物位計(jì)發(fā)射功率極低,可安裝于各種金屬、非金屬容器內(nèi),對(duì)人體及環(huán)境均傷害。
導(dǎo)波雷達(dá)是基于時(shí)間行程原理的測(cè)量?jī)x表,雷達(dá)波以光速運(yùn)行,運(yùn)行時(shí)間可以通過電子部件被轉(zhuǎn)換成物位信號(hào)。探頭發(fā)出高頻脈沖并沿纜式或桿式探頭傳播,當(dāng)脈沖遇到物料表面時(shí)反射回來被儀表內(nèi)的接收器接收,并將距離信號(hào)轉(zhuǎn)化為物位信號(hào)。
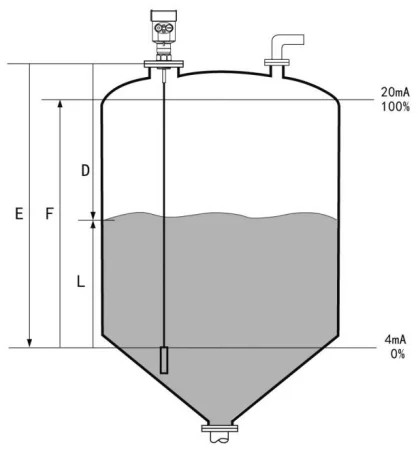
反射的脈沖信號(hào)沿纜式或桿式探頭傳導(dǎo)至儀表電子線路部分,微處理器對(duì)此信號(hào)進(jìn)行處理,識(shí)別出微波脈沖在物料表面所產(chǎn)生的回波。正確的回波信號(hào)識(shí)別由脈沖軟件完成,距離物料表面的距離D與脈沖的時(shí)間行程T成正比:
D=C×T/2 其中C為光速
因空罐的距離E已知,則物位L為:
L=E-D通過輸入空罐高度E(=零點(diǎn)),滿罐高度F(=滿量程)及一些應(yīng)用參數(shù)來設(shè)定,應(yīng)用參數(shù)將自動(dòng)使儀表適應(yīng)測(cè)量環(huán)境,對(duì)應(yīng)于4-20mA輸出。(如上圖)
測(cè)量說明:
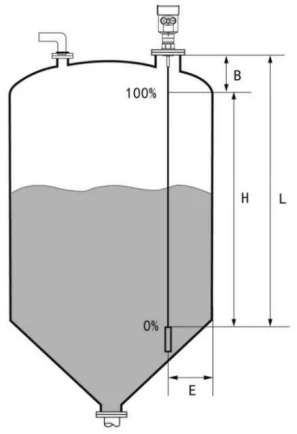
H----測(cè)量范圍
L----空罐距離
B----頂部盲區(qū)
E----探頭到罐壁的最小距離
頂部盲區(qū)是指物料最高料面與測(cè)量參考點(diǎn)之間的最小距離
底部盲區(qū)是指纜繩最底部附近無法精確測(cè)量的一段距離。
頂部盲區(qū)和底部盲區(qū)之間是有限測(cè)量距離。
注意:
只有物料處于頂部盲區(qū)和底部盲區(qū)之間時(shí),才能保證罐內(nèi)物位的可靠測(cè)量。
波雷達(dá)物位計(jì)")
波雷達(dá)物位計(jì)")
L329-C18G型1.8G桿式導(dǎo)波雷達(dá)物位計(jì)
典型應(yīng)用:液體、粉料、固體顆粒料
測(cè)量范圍:10米
頻率范圍:500MHz~1.8GHZ
測(cè)量精度:土10mm
介質(zhì)溫度:-40~130℃C,-40~250°C
過程壓力:-0.1~4.0MPa
過程連接:螺紋、法蘭(可選)
防護(hù)等級(jí):IP67
防爆等級(jí):EXiaICT6(可選)
信號(hào)輸出:4...20mA/HART(兩線/四線);RS485/MODBUS.
由于采用了先進(jìn)的微處理芯片和獨(dú)特的回波放大處理技術(shù),導(dǎo)波雷達(dá)物位計(jì)排除其他因素干擾,可以應(yīng)用于各種復(fù)雜工況。
多種過程連接方式及探測(cè)組件的型式,使得L329-C18系列導(dǎo)波雷達(dá)物位計(jì)適用于各種復(fù)雜工況及應(yīng)用場(chǎng)合。如:高溫、高壓及小介電常數(shù)介質(zhì)等。
采用脈沖工作方式,導(dǎo)波雷達(dá)物位計(jì)發(fā)射功率極低,可安裝于各種金屬、非金屬容器內(nèi),對(duì)人體及環(huán)境均傷害。
導(dǎo)波雷達(dá)是基于時(shí)間行程原理的測(cè)量?jī)x表,雷達(dá)波以光速運(yùn)行,運(yùn)行時(shí)間可以通過電子部件被轉(zhuǎn)換成物位信號(hào)。探頭發(fā)出高頻脈沖并沿纜式或桿式探頭傳播,當(dāng)脈沖遇到物料表面時(shí)反射回來被儀表內(nèi)的接收器接收,并將距離信號(hào)轉(zhuǎn)化為物位信號(hào)。
反射的脈沖信號(hào)沿纜式或桿式探頭傳導(dǎo)至儀表電子線路部分,微處理器對(duì)此信號(hào)進(jìn)行處理,識(shí)別出微波脈沖在物料表面所產(chǎn)生的回波。正確的回波信號(hào)識(shí)別由脈沖軟件完成,距離物料表面的距離D與脈沖的時(shí)間行程T成正比:
D=C×T/2 其中C為光速
因空罐的距離E已知,則物位L為:
L=E-D通過輸入空罐高度E(=零點(diǎn)),滿罐高度F(=滿量程)及一些應(yīng)用參數(shù)來設(shè)定,應(yīng)用參數(shù)將自動(dòng)使儀表適應(yīng)測(cè)量環(huán)境,對(duì)應(yīng)于4-20mA輸出。(如上圖)
測(cè)量說明:
H----測(cè)量范圍
L----空罐距離
B----頂部盲區(qū)
E----探頭到罐壁的最小距離
頂部盲區(qū)是指物料最高料面與測(cè)量參考點(diǎn)之間的最小距離
底部盲區(qū)是指纜繩最底部附近無法精確測(cè)量的一段距離。
頂部盲區(qū)和底部盲區(qū)之間是有限測(cè)量距離。
注意:
只有物料處于頂部盲區(qū)和底部盲區(qū)之間時(shí),才能保證罐內(nèi)物位的可靠測(cè)量。
在線留言
相關(guān)產(chǎn)品
備級(jí)無顯示衛(wèi)生型一體化溫度變送器")

波雷達(dá)物位計(jì)")
液位計(jì)")


